|
一、项目信息 |
|||
|
项目名称 |
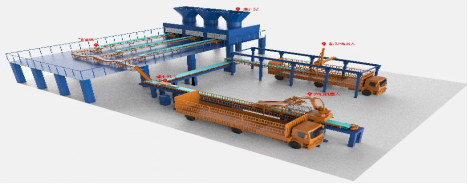
基于机器视觉的智能装车系统的研发及应用 |
||
|
委托时间 |
2021.09.18 |
所处阶段 |
小试 |
|
成果介绍 |
根据市场需求,按照产品规划,袋装产品市场已经落地2套智能装车系统,分别为桁架机器人装车系统及四轴机器人装车系统。 2套系统经过2年多的运行,总体稳定可靠,同时对于后续产品改进及新产品开发提供诸多技术经验。
|
||
|
技术指标和 市场前景 |
技术指标: 装车效率达到1200 pcs/h; 视觉扫描时间低于30s; 车辆定位精度 XY平面内定位精度达到±25mm; 车型识别率不低于99.96%; 适应车辆长度不高于20m; 适应车辆宽度不高于3.6m; 市场前景: 根据实际市场调研发现,目前粮食、饲料、化肥、建材等领域在淡季时节需要以堆垛的形式存储于仓库中,在旺季时节需要将粮食、饲料、化肥、建材等袋装物料直接装车运输。由于市场需求量大,劳动力不足,装车效率的高低将直接影响到企业的销售产量和供货速度,实现快速地装车运输是企业当下急需解决的问题。目前,企业使用的装车机多数为半自动化装车机,需要人工辅助从缓冲平台逐袋将物料装载至货车车厢。此种装车模式存在严重的问题:工人每天装车量大,作业强度较大,且由于袋状物料不易抓取,搬运不便等加剧了工人的劳动强度。为了不影响运输及后续装卸工作,对车厢内袋装物料的码放方式也有一定的限制要求,人工搬运码放有时随意摆放,容易导致车厢内袋装物料发生倾斜坍塌,不利于运输。 针对企业现有生产状况,企业急需一种高速、重载自动装车机器人,该机器人可实现袋装物料的高速抓取、搬运和码放等动作。与传统的半自动化装车设备相比,该自动装车机器人具有自动化程度高、装车效率高、可靠性高、使用范围广等特点,它的应用能够降低工人的劳动强度,减少差错率,实现全自动化物流管理。除了物流自动化装车及码垛外,工程物流还需要一个完整的,能够整合在途监控和仓库管理信息,进一步进行整个物流业务管理的信息化管理平台。该管理平台至少应该能够方便的与物流公司的ERP系统进行对接,能够提供客户进行订单追踪,提供物流公司全过程的信息化管理,提供收货方进行收货确认,提供驾驶员运输任务管理,提供仓库管理员方便的信息化仓库管理等等功能。 2019年中国成品饲料年度总产量18131.58万吨,2019年我国饮料累计产量15679.2万吨。近年来,随着人口红利的消失,在装车环节的用工成本逐渐加大,各行业对装车自动化的需求逐年递增。基于上述考虑,以实际项目为依托研发设计了一套具有自主知识产权的自动装车机器人控制系统,以此来提髙企业袋装物料的装车效率和质量,进一步促使自动装车机器人控制系统能够在未来自动化生产领域得到更广泛的应用,形成产业规模,摆脱长期依赖进口的局面,对促进国内物流运输行业的自动化产业升级具有重要的意义。智能物流系统主要应用于化工,食品行业的货车货物装车环节。智能物流系统的研究开发和设计以及后续的产业化将会突破现有的货物装车模式,并且本项目智能装车机器人系统关键技术有望达到国际先进水平。 |
||
|
项目获奖 情况 |
第二届全国机器人专利创新创业大赛,“袋装饲料自动码垛装车系统”项目荣获三等奖 |
||
|
拥有专利 情况 |
拥有CN201611128070.0、CN201911399735.5等专利12项 |
||
|
转化方式 |
合作、入股、许可、其他 |
技术领域 |
智能装备 |
|
交易价格 (万元) |
200 |
先进性 |
国内领先 |
|
二、权属信息 |
|||
|
成果所有权人 |
芜湖哈特机器人产业技术研究院有限公司 |
||
|
所在市县区 |
芜湖市鸠江区 |
联系人及联系 方式 |
/ |
|
三、交易机构信息 |
|||
|
机构名称 |
安徽联合技术产权交易所 |
||
|
联系人 |
管飞 |
联系方式 |
0551-65909081 |
|
地址 |
安徽创新馆3号馆1层 |
信息发布网址 |
www.ahtre.com |